Master Thesis — Multimodal Floorplan Encoding
Representation learning and geometry grounded features for multimodal floorplan understanding.

Representation learning and geometry grounded features for multimodal floorplan understanding.
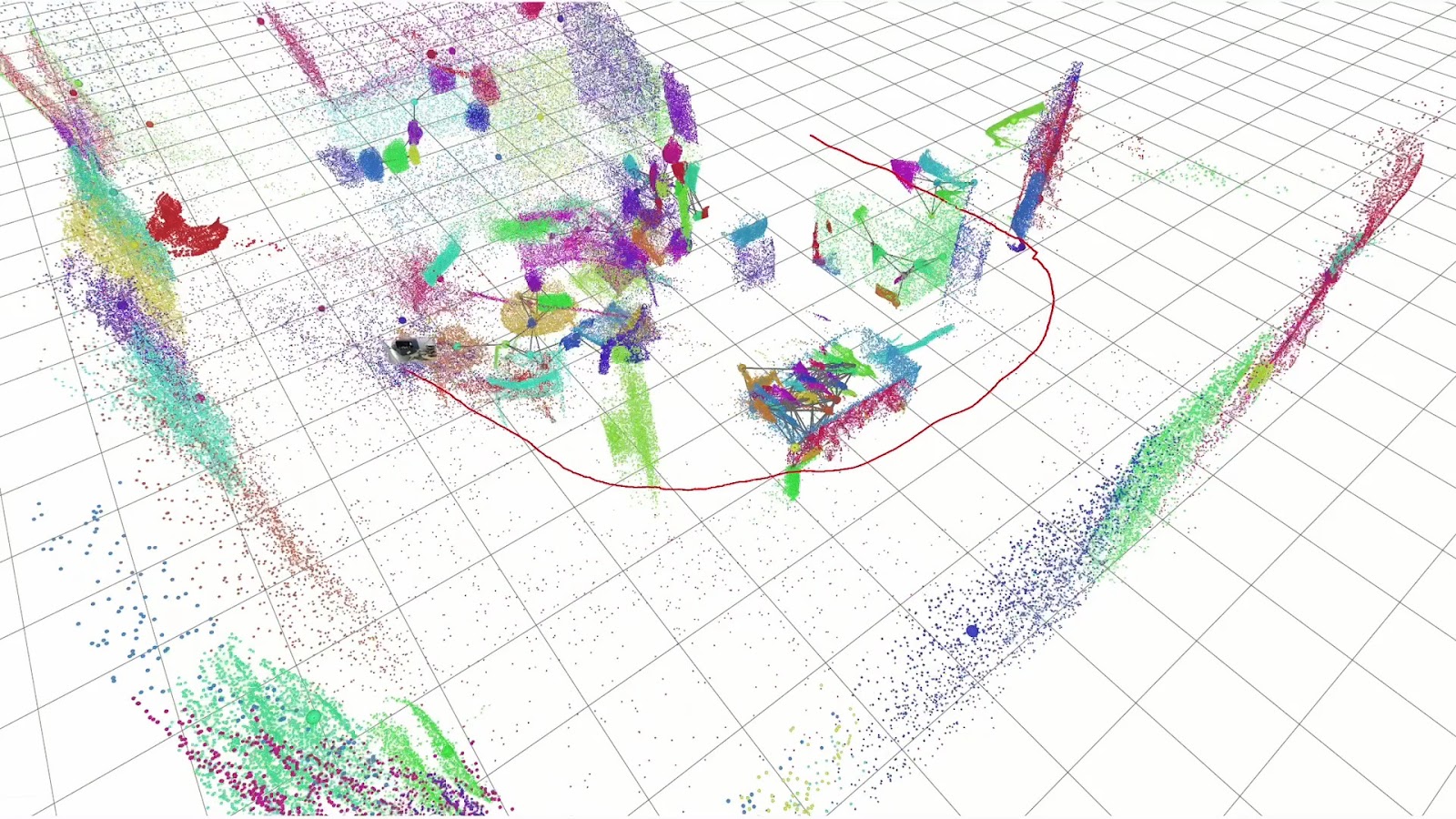
3% acceptance ratio. Online scenegraphs from RGB-D videos for robotics and scene understanding.
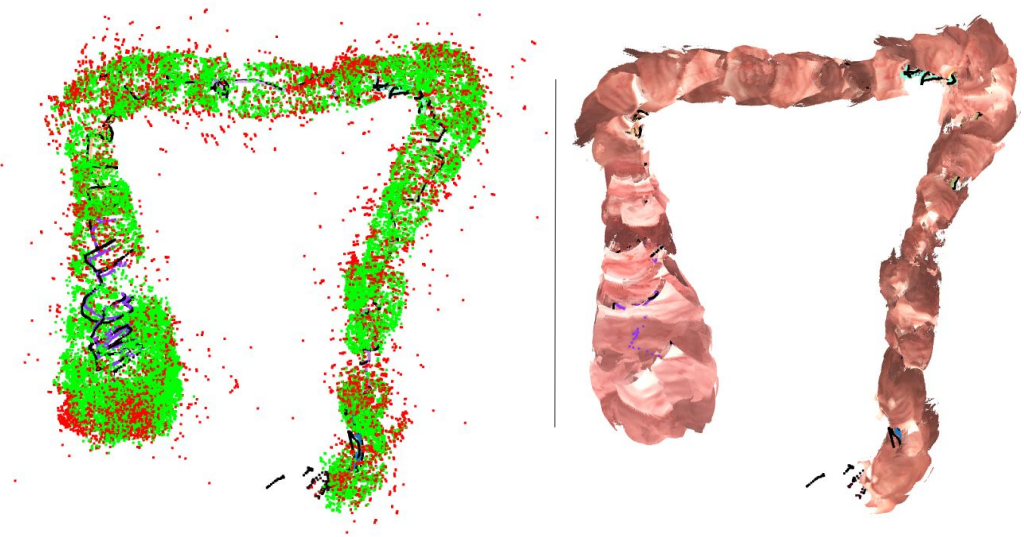
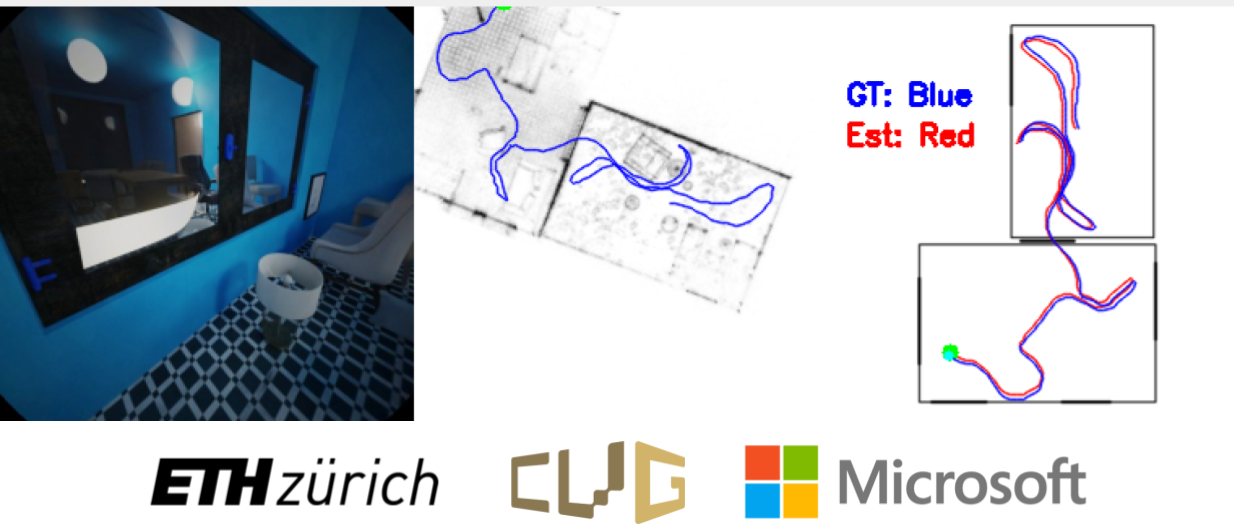
Dense Visual SLAM for in-body robotics. Depth estimation and geometric SLAM combined with learned methods.
Learned semantic matching. Deep generative models and representation alignment.
Autonomous underground drones. Deep learning for perception and reconstruction (NeRF, Deep SLAM, SFM) on the edge.
Diffusion models and neural implicit representations inside game engines.
Research and formation on deep learning techniques applied to computer vision, including reading groups and scientific writing.
3D capture (NeRF) and holographic display. Brain-Computer Interfaces in VR.
Integrating 4 RGB-D cameras to perform SLAM in simulated forestal environments.
Machine learning applied to computer vision. Modeling salience of video frames using 3D-CNN.