
Xavier Anadón García-Arquimbau
PhD researcher specializing in computer vision, 3D reconstruction, and geometric deep learning. I am part of the Robotics, CV & AI Lab (RoPeRT) at Universidad de Zaragoza, under the supervision of Prof. José María Martínez Montiel. My background includes a research stay at the Computer Vision and Geometry Group at ETH Zurich (2025) and internships across Europe. I received a BSc in Computational Mathematics (2023) with the highest GPA in the class, and an MSc in Robotics, Graphics, and Computer Vision (2024–2026, GPA: 9.62/10).
Deep Learning · 3D Vision · Multimodal Learning
Latest Experience
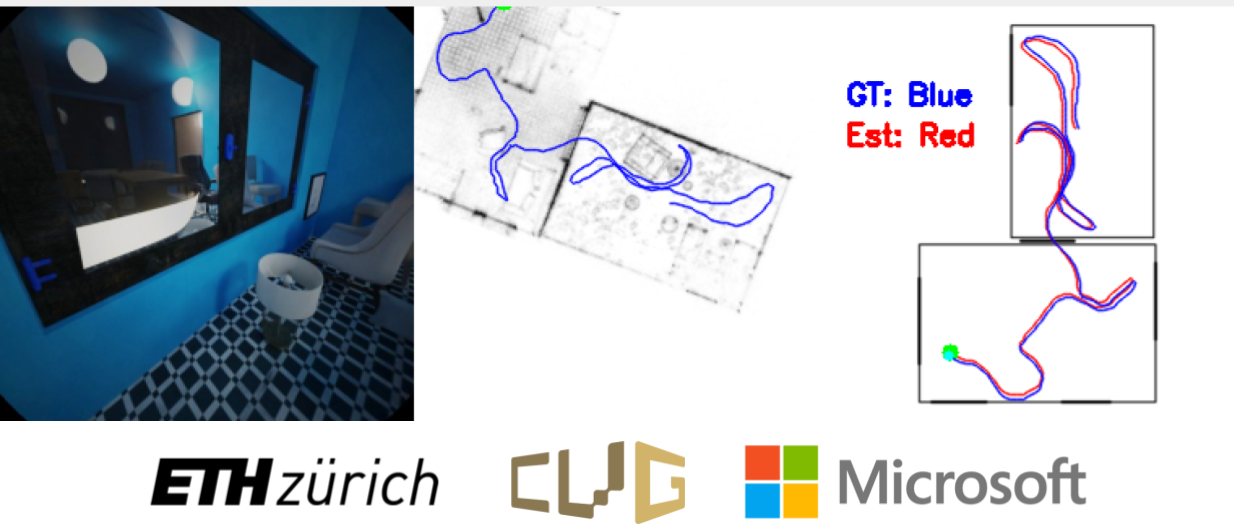
Master Thesis — Multimodal Floorplan Encoding
Representation learning and geometry grounded features for multimodal floorplan understanding.
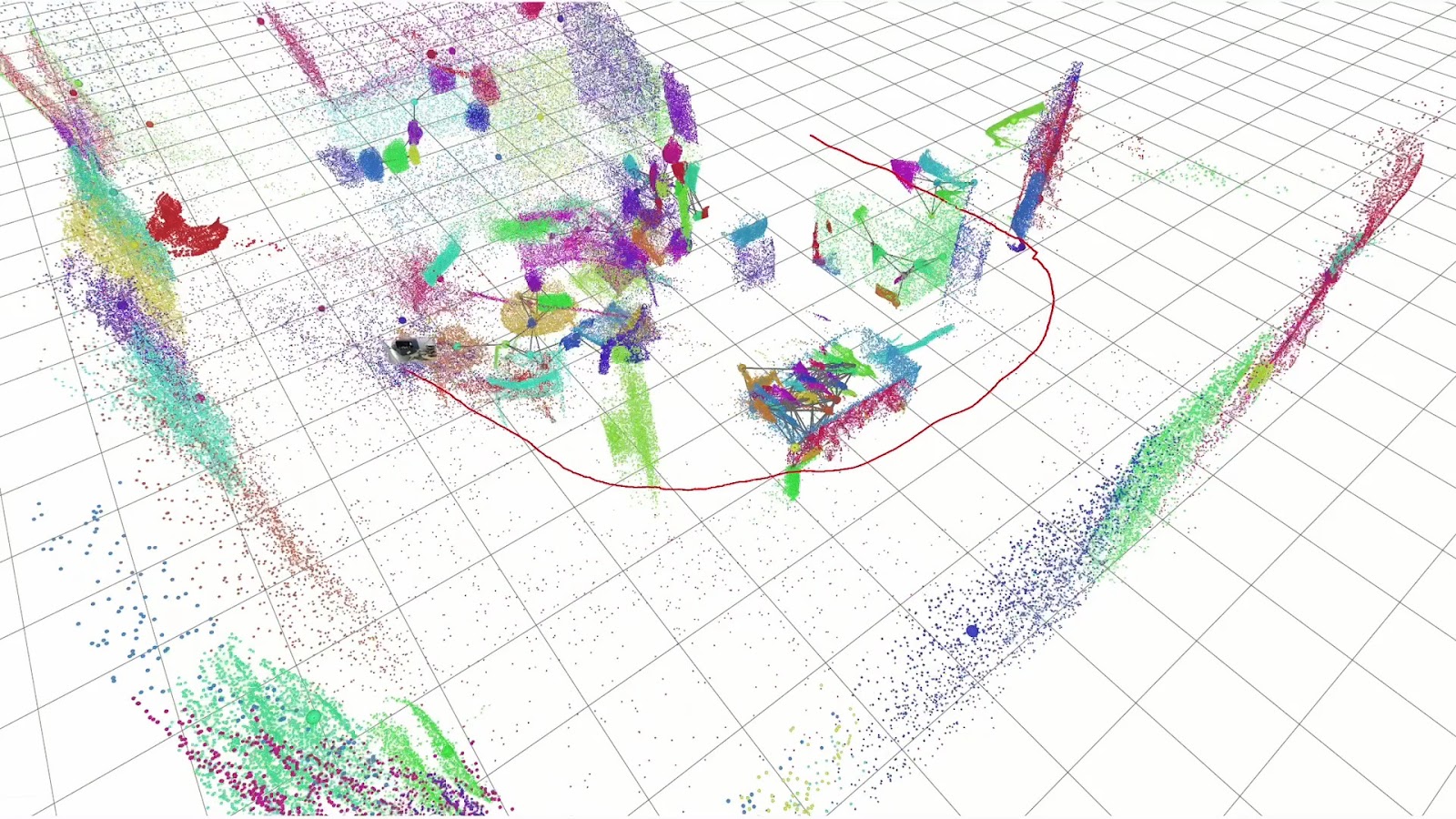
RobotX Summer Fellowship
3% acceptance ratio. Online scenegraphs from RGB-D videos for robotics and scene understanding.
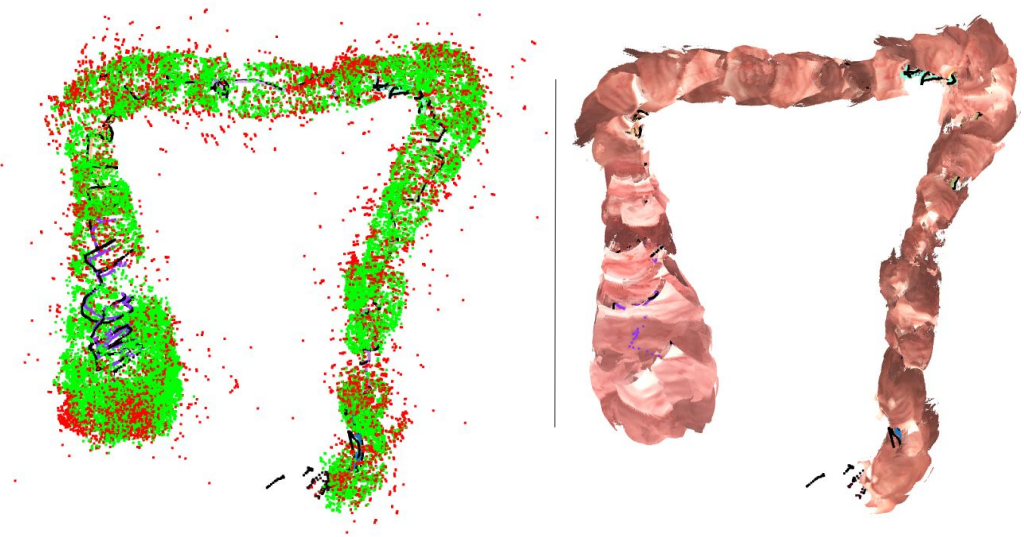
AI/CV Researcher
Dense Visual SLAM for in-body robotics. Depth estimation and geometric SLAM combined with learned methods.
Latest Publications
Characterizing Players of a Cube Puzzle Game with a Two-level Bag of Words
Published in UMAP '21: Adjunct Proceedings of the 29th ACM Conference, 2021
UMAP ‘21: Adjunct Proceedings of the 29th ACM Conference on User Modeling, Adaptation and Personalization.
Recommended citation: Xavier Anadón García-Arquimbau et al. (2021). "Characterizing Players of a Cube Puzzle Game with a Two-level Bag of Words." UMAP '21.
Download Paper
Latest Projects
Online Dynamic Scene Graphs from RGB-D Videos Permalink
Build scene graphs incrementally from an RGB-D data stream. Scene Understanding · RGB-D · Robotics · Rerun.
3D Densification for Multi-Map Monocular VSLAM in Endoscopy Permalink
Remove outliers and densify maps of sparse endoscopy multi-map CudaSIFT-SLAM. SLAM · Depth Estimation · Surgical Robotics.
NeRF in Looking Glass Permalink
Display Instant-NGP scenes in Looking Glass holographic displays. NeRF · VR · 3D Reconstruction.